A Line Following Robot using Arduino is a versatile project that showcases the integration of sensors, motors, and programming. By employing infrared sensors to detect a line's contrast against the surface, the Arduino microcontroller interprets this data to autonomously steer the robot along the path. Through continuous adjustments of motor speed and direction, the robot follows the line's course, making it an ideal educational tool for learning about robotics, automation, and sensor-based control systems.
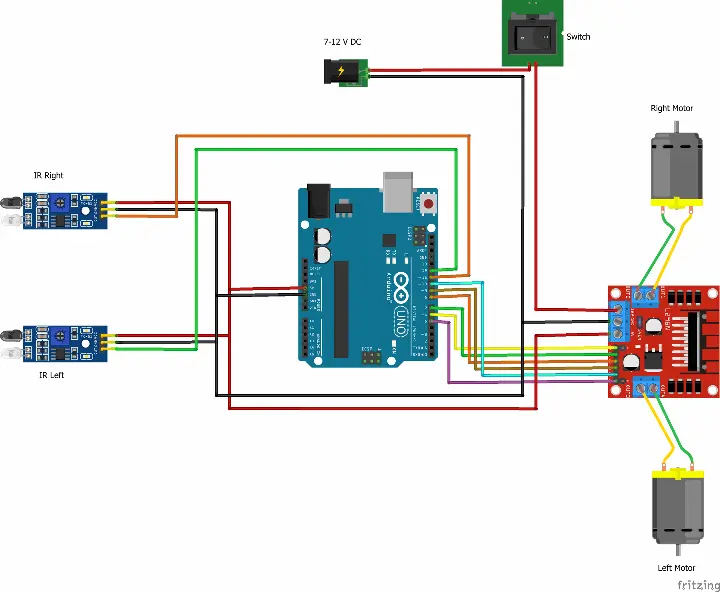
Circuit Diagram :-
Code :-
// By Arduino Techy
//
#define IR_SENSOR_RIGHT 11
#define IR_SENSOR_LEFT 12
#define MOTOR_SPEED 180
//Right motor
int enableRightMotor=6;
int rightMotorPin1=7;
int rightMotorPin2=8;
//Left motor
int enableLeftMotor=5;
int leftMotorPin1=9;
int leftMotorPin2=10;
void setup()
{//This sets frequecny as 7812.5 hz.
TCCR0B = TCCR0B & B11111000 | B00000010 ;
// put your setup code here, to run once:
pinMode(enableRightMotor, OUTPUT);
pinMode(rightMotorPin1, OUTPUT);
pinMode(rightMotorPin2, OUTPUT);
pinMode(enableLeftMotor, OUTPUT);
pinMode(leftMotorPin1, OUTPUT);
pinMode(leftMotorPin2, OUTPUT);
pinMode(IR_SENSOR_RIGHT, INPUT);
pinMode(IR_SENSOR_LEFT, INPUT);
rotateMotor(0,0);
}
void loop()
{int rightIRSensorValue = digitalRead(IR_SENSOR_RIGHT);
int leftIRSensorValue = digitalRead(IR_SENSOR_LEFT);
//If none of the sensors detects black line, then go straight
if (rightIRSensorValue == LOW && leftIRSensorValue == LOW)
{rotateMotor(MOTOR_SPEED, MOTOR_SPEED);
}
//If right sensor detects black line, then turn right
else if (rightIRSensorValue == HIGH && leftIRSensorValue == LOW )
{rotateMotor(-MOTOR_SPEED, MOTOR_SPEED);
}
//If left sensor detects black line, then turn left
else if (rightIRSensorValue == LOW && leftIRSensorValue == HIGH )
{rotateMotor(MOTOR_SPEED, -MOTOR_SPEED);
}
//If both the sensors detect black line, then stop
else
{rotateMotor(0, 0);
}
}
void rotateMotor(int rightMotorSpeed, int leftMotorSpeed)
{if (rightMotorSpeed < 0)
{digitalWrite(rightMotorPin1,LOW);
digitalWrite(rightMotorPin2,HIGH);
}
else if (rightMotorSpeed > 0)
{digitalWrite(rightMotorPin1,HIGH);
digitalWrite(rightMotorPin2,LOW);
}
else
{digitalWrite(rightMotorPin1,LOW);
digitalWrite(rightMotorPin2,LOW);
}
if (leftMotorSpeed < 0)
{digitalWrite(leftMotorPin1,LOW);
digitalWrite(leftMotorPin2,HIGH);
}
else if (leftMotorSpeed > 0)
{digitalWrite(leftMotorPin1,HIGH);
digitalWrite(leftMotorPin2,LOW);
}
else
{digitalWrite(leftMotorPin1,LOW);
digitalWrite(leftMotorPin2,LOW);
}
analogWrite(enableRightMotor, abs(rightMotorSpeed));
analogWrite(enableLeftMotor, abs(leftMotorSpeed));
}
Components :-