A soldier monitoring system using Arduino enhances safety and operational efficiency by tracking vital signs (heart rate, body temperature, oxygen levels) and location in real-time. The system includes an Arduino microcontroller, vital sign sensors, a GPS module, a communication module (GSM or RF), and a battery pack, all integrated into wearable gear. Data collected is processed by the Arduino and transmitted to a central command for real-time monitoring, triggering alerts for abnormal conditions. This allows for quick response to health issues, informed decision-making, and improved mission planning, while challenges include ensuring battery life, data security, and system durability in harsh conditions.
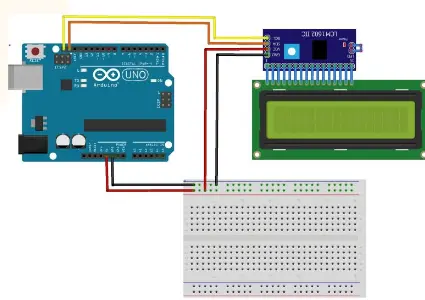
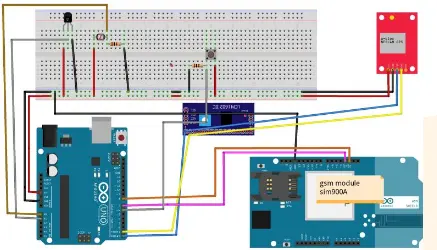
Circuit Diagram
Code:-
#include <TinyGPS.h>
#include <SoftwareSerial.h>
#include <Wire.h>
#include <LiquidCrystal_I2C.h>
LiquidCrystal_I2C lcd(0x27, 16, 2);
SoftwareSerial Gsm(7, 8);
char phone_no[] = "+91XXXXXXXXXX"; //replace with phone no. to get sms
TinyGPS gps; //Creates a new instance of the TinyGPS object
int state;
String textMessage;
const int sensor=A1;
const int ldrPin = A0;// Assigning analog pin A5 to variable 'sensor'
float tempc; //variable to store temperature in degree Celsius
float vout; //temporary variable to hold sensor reading
void setup()
{
Serial.begin(9600);
Gsm.begin(9600);
delay(2000);
// AT command to set SIM900 to SMS mode
Serial.print("AT+CMGF=1\r");
delay(100);
// Set module to send SMS data to serial out upon receipt
Serial.print("AT+CNMI=2,2,0,0,0\r");
delay(100);
pinMode(6,INPUT);
pinMode(sensor,INPUT);
pinMode(ldrPin, INPUT);
lcd.begin();
lcd.backlight();
lcd.clear();
lcd.print("Searching ");
lcd.setCursor(0,1);
lcd.print("Network....... ");
delay(3000);
}
void loop()
{
lcd.clear();
lcd.print("Soldier Tracking");
lcd.setCursor(0,1);
lcd.print("System...!!");
delay(100);
bool newData = false;
unsigned long chars;
unsigned short sentences, failed;
// For one second we parse GPS data and report some key values
for (unsigned long start = millis(); millis() - start < 1000;)
{
while (Serial.available())
{
char c = Serial.read();
Serial.print(c);
if (gps.encode(c))
newData = true;
}
}
//////////////////////////////////////////////////////////////////////////////
vout=analogRead(sensor); //Reading the value from sensor
vout=(vout*500)/1023;
tempc=vout;
int ldrStatus = analogRead(ldrPin);// Storing value in Degree Celsius
////////////////////////////////////////////////////////////////////////////
if(Gsm.available()>0){
textMessage = Gsm.readString();
textMessage.toUpperCase();
delay(10);
}
if(textMessage.indexOf("LOCAL")>=0){
lcd.clear();
lcd.print("Message Recevived");
delay(3000);
lcd.clear();
lcd.print("Getting ");
lcd.setCursor(0,1);
lcd.print("Location ");
delay(3000);
float flat, flon;
unsigned long age;
gps.f_get_position(&flat, &flon, &age);
Gsm.print("AT+CMGF=1\r");
delay(400);
Gsm.print("AT+CMGS=\"");
Gsm.print(phone_no);
Gsm.println("\"");
lcd.clear();
lcd.print("Sending location");
lcd.setCursor(0,1);
lcd.print("To Base....");
delay(3000);
Gsm.println("Asheesh ,Battalion No. 1233456 ");
Gsm.print("Temperature is ");
Gsm.println(tempc);
Gsm.print("Heartbeat is ");
Gsm.println(ldrStatus/10);
Gsm.print("http://maps.google.com/maps?q=loc:");
// Gsm.print("Latitude = ");
Gsm.print(flat == TinyGPS::GPS_INVALID_F_ANGLE ? 0.0 : flat, 6);
//Gsm.print(" Longitude = ");
Serial.print(",");
Gsm.print(flon == TinyGPS::GPS_INVALID_F_ANGLE ? 0.0 : flon, 6);
delay(200);
Gsm.println((char)26); // End AT command with a ^Z, ASCII code 26
delay(200);
Gsm.println();
delay(10000);
lcd.clear();
lcd.print("location Sent");
delay(3000);
}
state= digitalRead(6);
if(state==1) //If newData is true
{
float flat, flon;
unsigned long age;
gps.f_get_position(&flat, &flon, &age);
Gsm.print("AT+CMGF=1\r");
delay(400);
Gsm.print("AT+CMGS=\"");
Gsm.print(phone_no);
Gsm.println("\"");
lcd.clear();
lcd.print("Sending location");
lcd.setCursor(0,1);
lcd.print("To Base....");
delay(3000);
Gsm.println("Alert I need help....Asheesh ,Battalion No. 1233456 ");
Gsm.print("Temperature is ");
Gsm.println(tempc);
Gsm.print("Heartbeat is ");
Gsm.println(ldrStatus/10);
Gsm.print("http://maps.google.com/maps?q=loc:");
// Gsm.print("Latitude = ");
Gsm.print(flat == TinyGPS::GPS_INVALID_F_ANGLE ? 0.0 : flat, 6);
//Gsm.print(" Longitude = ");
Serial.print(",");
Gsm.print(flon == TinyGPS::GPS_INVALID_F_ANGLE ? 0.0 : flon, 6);
delay(200);
Gsm.println((char)26); // End AT command with a ^Z, ASCII code 26
delay(200);
Gsm.println();
delay(10000);
lcd.clear();
lcd.print("location Sent");
delay(3000);
}
else{
lcd.clear();
lcd.print("Soldier Tracking");
lcd.setCursor(0,1);
lcd.print("System ");
delay(10);
}
Serial.println(failed);
// if (chars == 0)
// Serial.println("** No characters received from GPS: check wiring **");
}
Components:-
Arduino Uno

Sim 900A




Temperature Sensor